
disarming is a performative exploration of the relation between detached robot arms, artificial environments, and human observers, as well as a search for potential future roles of robotics & AI in our society. A learning and unlearning of locomotions in postanthropocentric environments and times. The work playfully explores the ambiguity of disarming as a process of physical detachment and emotional attachment.
Locomotion can be seen as a primal (post-birth) instinct and ultimate act of independence. A robotic limb, somehow detached from a human-constructed technological body, tries to find concepts for advancing movements even though it initially wasn’t made for locomotion – vulnerable yet determined. Parallel to a familiar dystopian plot of technological autonomy and the feelings going with it, witnessing these first clumsy tries may awaken compassion or even a certain emotional bond.
disarming paints a picture of a multi-layered narrative of technology as a convoluted species and potential valuable mediator in a multi-species world. An ecological system of intertwined digital and physical realms with parallel learning/unlearning on different levels. A relational world with and between independence and still connectedness.
disarming II is encounterable in three variations::
- Intra-active Performance (with an AI-driven robotic arm & two human performers)
- Intra-active Installation (with an AI-driven robotic arm durationally learning)
- Intra-active Video Installation (with an AI continuously re-narrating the video cut)
########################
In Dialogue: Artist Talk with WRO Art Center
WRO Art Center: For your residency, you've been working on a project named disarming. Tell me about it.
Emanuel Gollob: disarming is a series of works exploring the relationship between a detached robotic arm, its artificial environment, and the human observer.
WRO Art Center: It is a machine that learns to locomote. How is that?
Emanuel Gollob: I was intrigued to pick up the industry's narrative of robots becoming more and more autonomous with the help of machine learning. Looking back in history, there has been a time when autonomy, or the ability to be self-moving, was explored as one definition of being alive. Today, we have very different definitions of aliveness, but we still have this tendency towards anthropomorphization. Thus in disarming, each format & iteration features a different constellation in which a detached robotic arm continuously tries to learn how to move forward.
WRO Art Center: What’s your role in that learning?
Emanuel Gollob: My role in it is to create an open setting in which the learning is stretched and inefficient, creating a space to observe one's own projections and the multiplicity of relationships emerging and transforming between oneself, the robotic arm, the environment, and potential human co-performers. The algorithm's inherent goal orientation thus receives a performative embedding.
WRO Art Center: What kind of modalities of the work can we encounter?
Emanuel Gollob: disarming II is experienceable in three formats:
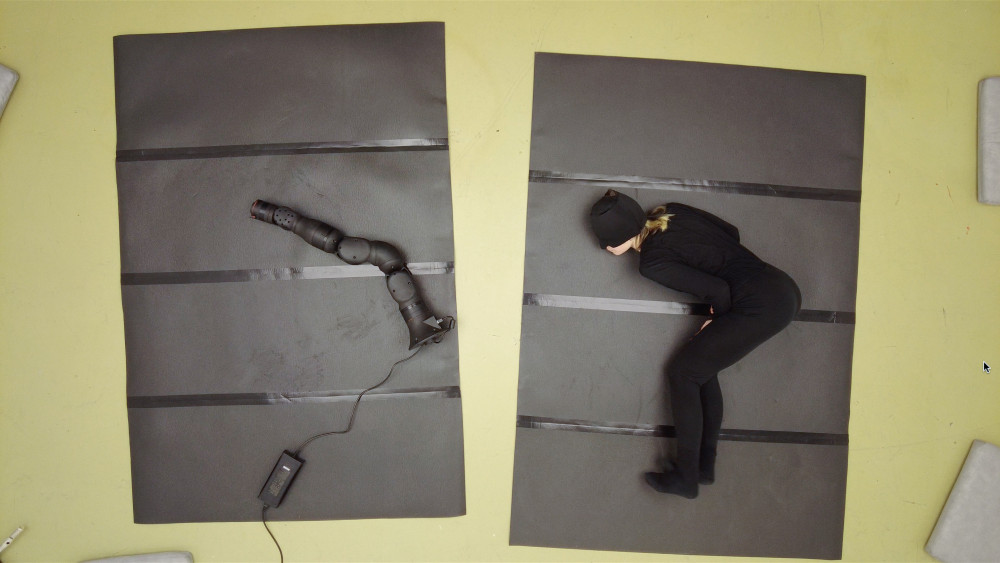
In the performance format, the detached robotic arm is accompanied by two human performers. One bodily imagining themselves in the situation of the robot learning body movement from new, while a second human performer bringing in their individual musical knowledge on attunement as well as navigation of bodies & spaces. In this format, the robotic arm continuously learns & unlearns based on stereophonic listening and haptic feedback, exploring ways of moving forward in balance with the sound of friction & resistance.
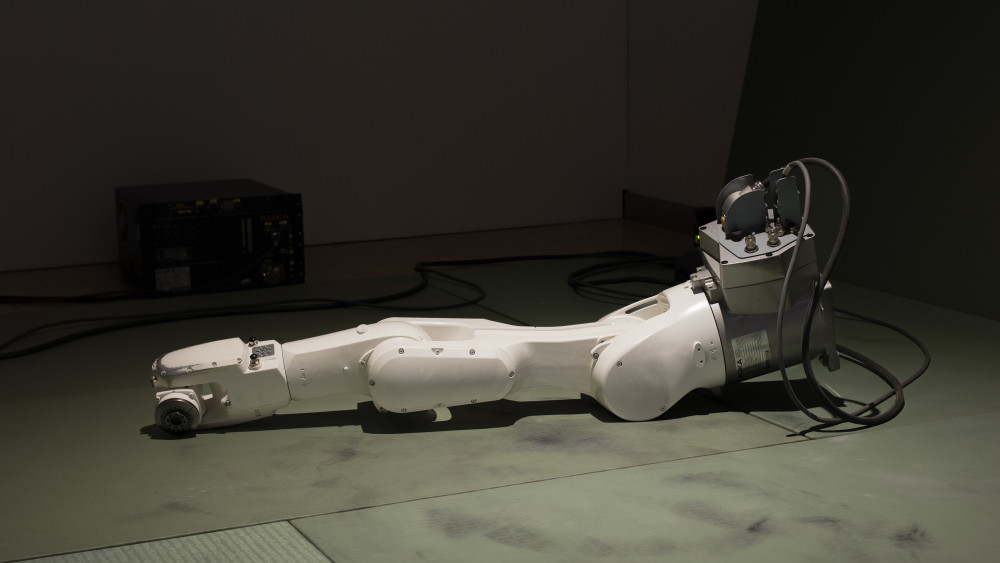
In the installation format, a detached robotic arm is durationally learning locomotion on a gym mattress in relation to its embedded virtual concept of its machinic body and surrounding space. It is aiming for strategies to increase the distance from the starting point, resulting in glitches of virtual success and physical struggle, as well as vice versa.
In the video format, the RL algorithm, learning physical locomotions with the robotic body in the video footage of disarming I, now observes the likelihood of recent social media postings mentioning “robot” and “arm” in the same post. In reference to this, the algorithm continuously learns and unlearns how to narrate the video scenes to decrease this tendency.
WRO Art Center: The project seems to be ongoing.
Emanuel Gollob: I believe in doing art in an open and iterative manner, inviting collaborators, institutions, and environments to continuously evolve and extend this project together. By doing so, in some iterations, hidden layers of the project are brought to attention, while in others, additional cross-discipline links are explored. Due to that, I was particularly excited to collaborate for the performance format of my disarming II series with Dasha Bogdan, a dancer experienced in Butoh & contact dance, and Mar Sala Romagosa, a sound artist & flute player with a particular interest in multidisciplinary performances. Collaboratively shaping a hierarchically balanced performance where the robotic arm, Dasha and Mar, largely rely on sound and movement main modalities while still bringing in their unique tacit knowledge was challenging but I am super happy with how our collaboration evolved. Observing Dasha bodily imagining how she would re-learn motions based only on acoustic & haptic feedback while Mar acoustically brings in her experience in attuning with instruments, improvisation based on listening as well as musical references on bodies navigating in space and vice versa, to me, truly added another angle to disarming.
WRO Art Center: As far as I understand, you are combining industrial engineering, artificial intelligence with performance and work of the audience. So how did it all start for you?
Emanuel Gollob: During my integrated master's study in Design Investigations at the University of Applied Arts Vienna, I started to focus on how our ability to do nothing is changing in parallel to digitalization. And I found it ironic that automation is luring us with the promise that with AI-driven robotics, we might have more free time as robots will be working for us, but at the same time, we are also scared that maybe suddenly, we will have nothing to do. That was my start to delve further into our performative relationship with technology.